一种自动化码头TOS系统优化模型:泊位策划、桥机计划、自动配载
当前位置:点晴教程→知识管理交流
→『 企业管理交流 』
介绍自动化码头计算机管理系统的基本功能模块,并以泊位策划、桥机工作计划、自动配载为例,介绍TOS中的一些优化问题。针对有单向航道约束的泊位策划问题,将其转化为组合优化中的经典二维装箱问题,并建立整数线性规划模型。利用MATLAB自带Intlinprog求解器进行编程,数值试验结果表明该方法具有良好优化效果。
引 言 集装箱码头自动化包括半自动化和全自动化。一般认为,半自动化码头是仅有堆场作业系统实现自动化;全自动化码头是除堆场作业系统实现自动化外,水平运输和装卸船作业也都实现自动化。1993年,世界上第1个集装箱自动化码头在荷兰鹿特丹的ECT Delta Sealand正式投产。到目前为止,荷兰的ECT、Euromax、M II、RWG码头,德国的CTA码头,美国的LBCT、TraPac码头,澳大利亚的Patric码头,日本的名古屋码头以及我国的厦门远海、青岛和上海洋山已建成了全自动化码头。码头计算机管理系统(Terminal Operation System,TOS)是码头正常运营的基础和关键,自动化集装箱码头的TOS系统在原有TOS系统的基础上需要重点解决设备之间的实时交互问题,并增加计划与控制之间的相互协同功能。
自动化码头的生产作业管理系统 目前,国内外的TOS系统,主流的有美国的Navis系统、比利时的COSMOS系统、韩国的TBS系统、上海港的TOPS系统等。其中:Navis公司成立于1988 年,是全球首家提供自动化集装箱码头管理系统的公司,其提供的TOS系统是全球码头运营商马士基集装箱码头公司(APM Terminals)、迪拜环球港务集团(DP World)、美国总统轮船公司(APL)和菲律宾国际货柜码头服务公司(ICTSI)的首选解决方案。上海港在充分吸收国内外先进经验的基础之上,研发基于自动化集装箱码头的TOS系统,通过桥机作业计划、实时配载以及自动发箱等智能化模块产生实时作业指令,并通过实际执行结果进行指令的动态调整。该系统已经在上海港洋山自动化码头投入使用。 TOS系统基本上都是由客户端、服务端和后台中心数据库等组成的,并主要以码头为单位进行部署。服务端根据码头业务的需要,在自动化集装箱码头中基本都是采用集群的方式进行部署的,根据业务量和交互量大小来决定集群的规模。自动化码头TOS系统结构见图1。
在TOS系统中,涉及的优化问题多集中在泊位策划、作业资源策划、自动配载和堆场策划等模块中。
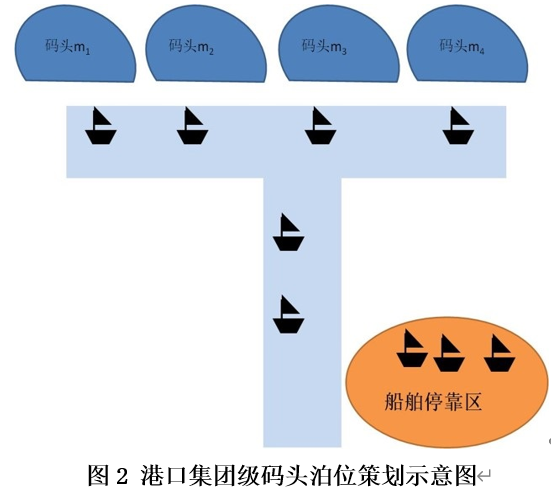
生产作业管理系统的优化问题 2.1 泊位策划 作为货物运输进入港口的第1步,泊位分配是重要环节。合理的泊位分配可以提高集装箱码头的生产效率、减少船舶在港时间,从而提高集装箱码头竞争力。在集装箱船舶到达港口之前为其安排停靠点、靠离泊时间和作业时间,直接体现码头收纳集装箱船的能力。因此,泊位策划的质量直接影响到整个码头效率。同时,作为后续装卸机械资源安排、作业计划和自动配载的先决条件,泊位策划是自动化集装箱码头智能化系统中的“引领者”。 该问题的一般描述为:港口拥有m个码头,每个码头拥有不同的海岸线、吃水深度等,船舶靠泊受运送货物种类、船长、吃水、优先级和码头当前停靠情况等综合因素的限制,泊位策划是在已知船舶和各码头信息的基础上,对未来一段时间内每艘船舶靠泊进行规划,使港口海岸线整体的利用率尽可能大。若m=1,则为单码头泊位策划问题;否则,则为港口集团级码头泊位策划问题。对于港口集团级码头泊位策划问题,又往往涉及公共航道的管理问题,可称为带有航道约束的多码头泊位策划。港口集团级码头泊位策划示意图见图2。
国内外学者针对泊位分配与装卸桥调度问题展开大量的研究,开发一系列模型和算法,主要分为2类:一类是离散泊位分配模型,如Nishimura等建立离散泊位分配模型,设计基于遗传算法的求解方法;Imai等在模型中考虑不同船舶营运人不同停泊优先权,设计基于遗传算法的启发式算法;Kim等利用模拟退火算法求解离散泊位分配问题。另一类是连续泊位分配模型,将码头岸线看作连续的整体,根据船舶长度依次停泊,Wang等将泊位问题视为多阶段决策问题,设计基于随机束搜索算法的求解方法。在港口作业这种常常出现各种干扰事件(如恶劣天气、设备故障等)的环境下,常常会打乱原有的调度计划,降低集装箱码头的作业效率与服务水平。因此,需要对泊位计划进行调整,以减少干扰事件对系统的负面影响。Tian等和曾庆成等建立泊位分配与装卸桥调度干预管理模型和算法。本文将进一步介绍和研究港口集团级码头泊位策划问题的模型和算法。 2.2 桥机工作计划 桥式起重机(以下简称“桥机”)作为港口装卸货物的主要工具,其工作计划的合理制定对提高装卸效率起着重要作用。桥机装卸示意图见图3。船舶靠泊后,由桥机进行集装箱的装卸操作,桥机在工作时需要满足诸多约束:
桥机工作计划就是安排可调用桥机尽快完成集装箱装卸作业,在上述约束条件之下,将完成单船装卸作业的工作时间最小化。桥机工作计划问题是TOS系统的核心问题,得到国内外学界和产业界的广泛关注。Zhu等[8]以桥机之间不可交叉移动为约束,以桥机工作时间最小化为优化目标,利用分支定界和模拟退火算法分别对模型进行求解,最终得到桥机在不同贝位的工作顺序;Daganzo[9]研究桥机在1个贝位上工作时可被打断的情况,与以往的研究不同,1个贝位上的工作可由多个桥机共同完成,但作者并未考虑桥机不能交叉移动的约束;Kim等将船贝看作是船舱和甲板的集合,考虑桥机移动时间、不可交叉、安全操作距离等约束建立数学规划模型,并设计分支定界算法和贪婪随机自适应搜索算法;Moccia等在Kim等的基础上,提出更加严格的数学模型,并提出分支切割算法;Sammarra等在此基础上又提出一种禁忌搜索方法,通过降低解的质量,大幅缩短求解时间;陆书翔等建立该问题的多目标工作计划数学模型和基于完工时间下界的近似算法。 2.3 自动配载 自动配载是指在需要装船的集装箱及其在堆场的具体位置已知的前提下,按照船公司的预配要求给堆场内每个需要装船的集装箱安排对应的船舶位置,使总装卸效益最大。自动配载的结果需要满足预配船图的所有规则,给出所有需要配载的出口集装箱对应船舱上的位置,在此基础上还需要给出每个集装箱的装载顺序。因此,自动配载的任务不仅需要考虑集装箱属性对于其最终装载位置的影响,还需要考虑出口集装箱的堆场分布和出箱点对于装配顺序的影响。由于自动配载的目标就是在保证船公司配载规则的条件下使码头作业效率最高,因此必须考虑船公司的配载要求。船公司的配载要求中只指定船舱上的列位位置的集装箱的属性(特殊箱、卸货港、高平箱和箱尺寸等),所以该问题可以抽象成如下集合匹配问题:列位位置集合S={s1,s2,…,sn},预装集装箱集合T={t1,t2,…,tn}。每个集装箱的属性(重量、尺寸、卸货港等)已知,每个列位位置规定所放集装箱满足的属性已知。需要建立1个映射f:S→T在满足每个位置对应的箱子属性要求的前提下,使码头装卸效率最高(桥机效率高、翻箱量少、堆场设备无谓移动少等)。 Wilson等对自动配载问题提出两阶段分块求解策略;Kang等在此基础上进行了进一步研究;张维英等采用基于二叉搜索树的启发式装箱算法求解;Delgado等给出了一种快速的近似算法。
港口泊位策划模型和算法 考虑到带有航道约束的多码头泊位策划问题,采用连续型泊位分配方法,在优化泊位方案的同时考虑单向航道进出的问题。模型假设如下:
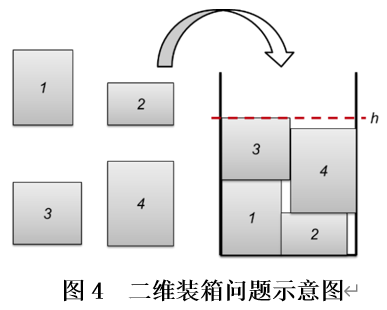
本文中,将泊位策划问题转化为二维装箱问题(Two-Dimensional BinPacking Problem,2DBPP)。经典的二维装箱问题为:给定1定数量的小矩形,给定1个大矩形,将所有的小矩形装入大矩形中,使得装入高度最低。二维装箱问题示意图见图4。
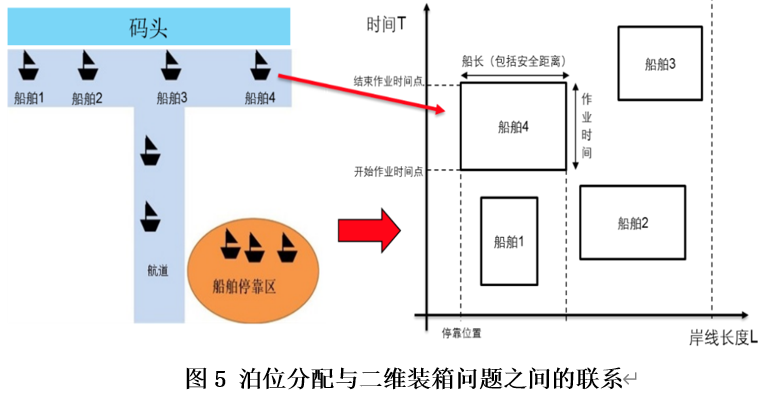
将二维装箱问题与泊位策划模型联系起来,泊位分配与二维装箱问题之间的联系见图5。图中左边的船舶1至船舶4对应右侧中的矩形。也就是说,1个矩形就代表了1艘船只的泊位分配。因此,要求右图所有的矩形不重合,并按一定约束装入该“大矩形”,使总作业时间尽可能地少。
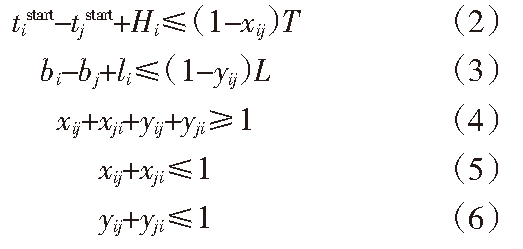
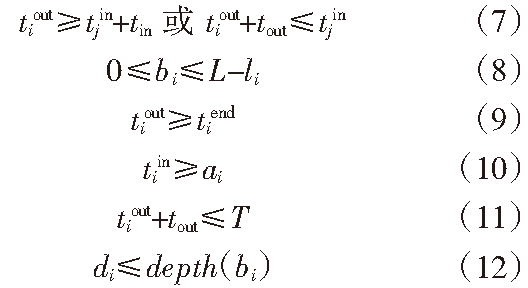
3.1 模型参数、目标和约束条件 方案目标为最后一艘船只离开港口的时间点减去第一艘船只到港的时间点的间隔时间最小化,该时间差代表所有船只从开始到结束作业所用时间的总和。因此,该模型的目标函数为
模型约束条件为
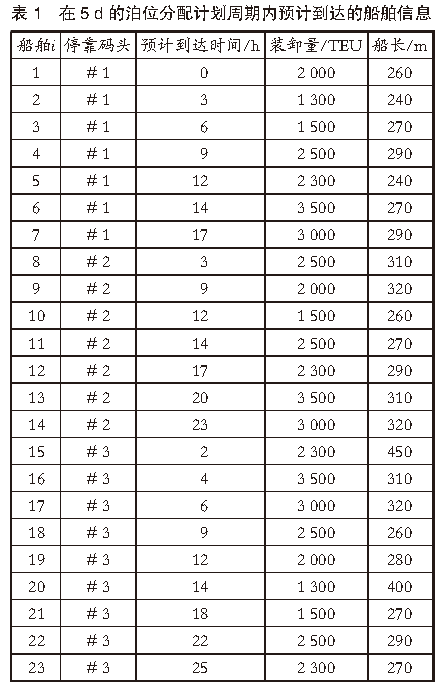
式中:i∈N(i=1,...,n)为n艘船只集合;L为码头岸线长;T为规划时间;li为每艘船的长度,包含安全距离;di为每艘船的吃水深度;ai为每艘船预计到达的时间;Hi为每艘船作业时间;tin为驶入航道所需时间;tout为驶出航道所需时间;Vi为每艘船的速度;Wi为每艘船的货物量;depth(bi)为停靠位置bi处能承受的最深出水深度;bi为船舶停靠位置;tiin为船舶驶入航道的时间点;tistart为船舶开始装卸作业的时间点;tiend为船舶结束作业的时间点;tiout为船舶驶出航道的时间点,xij表示若船舶i完全在j的左方,则为1,否则为0;yij表示若船舶i完全在j的下方,则为1,否则为0。 约束(2)~(6)保证船只作业计划在二维图上不重叠,约束(7)保证航道单向的特点,约束(8)保证停靠位置在岸线范围内,约束(9)保证驶出时刻一定在结束作业时刻之后,约束(10)保证驶入航道时间一定在到港时间之后,约束(11)保证作业时间一定在规划时间之内,约束(12)保证船只停靠的位置符合船只吃水深度。显然,若遇到多个码头的情况,只需将L分为多个Li,然后对bi进行约束即可。 3.2 模型求解 MATLAB中Intlinprog进行整数线性规划编程。在实验数据的设计上,一共模拟23艘船只,这些船只需要分别停靠在港口的3个码头,在5 d的泊位分配计划周期内预计到达的船舶信息见表1,其中包含船只预计到达时间、船舶的装载量以及船长。
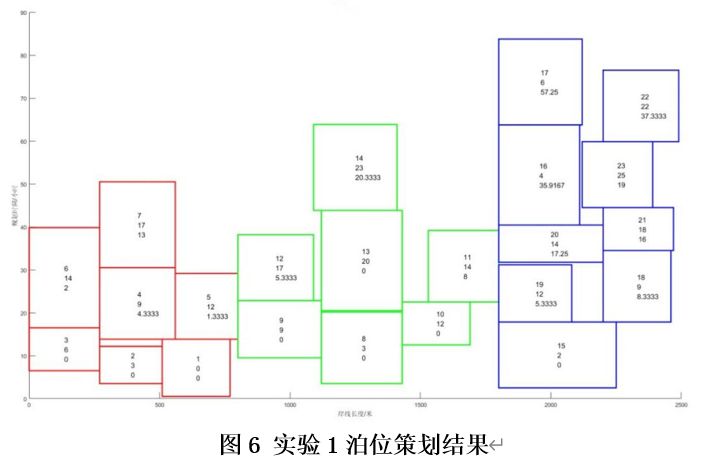
假设# 1码头岸线为0~800 m,# 2码头岸线为800~1 800 m,#3码头岸线为1 800~ 2 500 m,假设每个码头装卸效率为150自然箱/h,码头泊位水深都能满足船只吃水线要求。在此基础上运行程序240 s,得到泊位分配计划,实验1泊位策划结果见图6。其中,左侧3列、中间3列、右侧2列方框分别表示只能停靠# 1、# 2、# 3码头。方框中,第1个数字代表第i艘船,第2个数字代表船只到达时间,第3个数字代表在停靠区域等待时间,需要尽量让船只在完成手续的前提下尽快作业,因此等待时间越短越好。
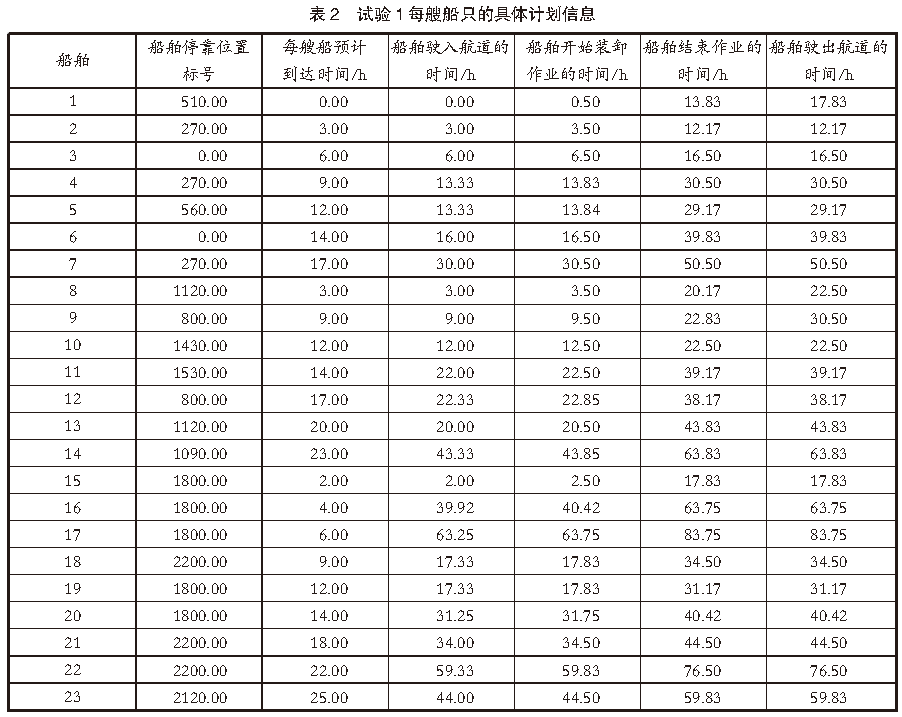
在完成泊位计划后,该情况下的航道占有情况也相应而出。 最后得到23艘船在港作业总时间为84.5h。试验1每艘船只的具体计划信息见表2。表2的每一列将船只的具体停靠位置、具体进出港口的时间点、作业时间、等待时常都相应地表示出来,在泊位策划时可将此表作为参考来进行船只的排位,并进行单向航道的具体规划。由航道规划可知,航道进出的时间就整个5 d的规划长度来说较为离散。因此,在实际运用中,可以人为地对航道进出时间进行调试,而不会影响到整体的规划。由图6可以看出,二维图中的空缺处较少,可知每个码头的码头利用率较高。船只的长度有400 m量级的大船,也有200 m量级的小船,总体符合港口实际情况。
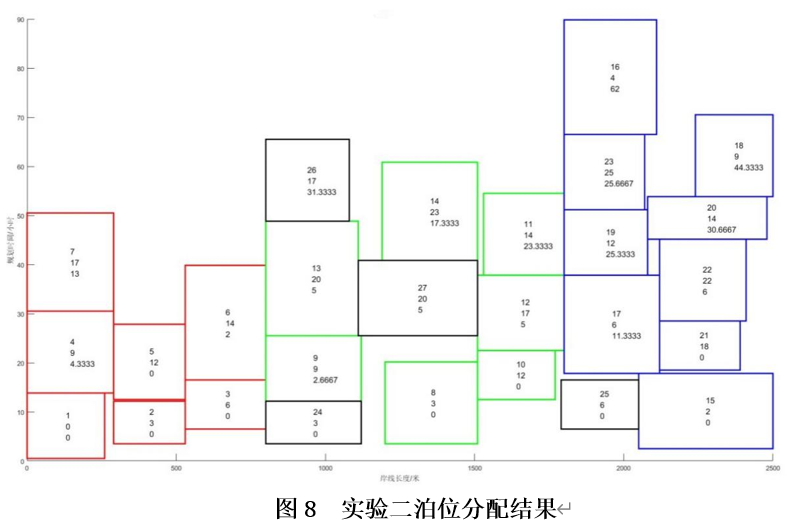
考虑到部分船舶可以停靠任意码头。因此,在原来数据基础上,新增4艘可以停靠任意码头的船舶,新增船舶信息见表3,其他参数不变,重新运行程序,经过1 400 s的计算,试验2泊位分配结果见图8,其中最优在港时间为90.58 h。
该文章在 2025/3/28 18:28:54 编辑过 |
关键字查询
相关文章
正在查询... 



|


 400 186 1886
400 186 1886